企業動態
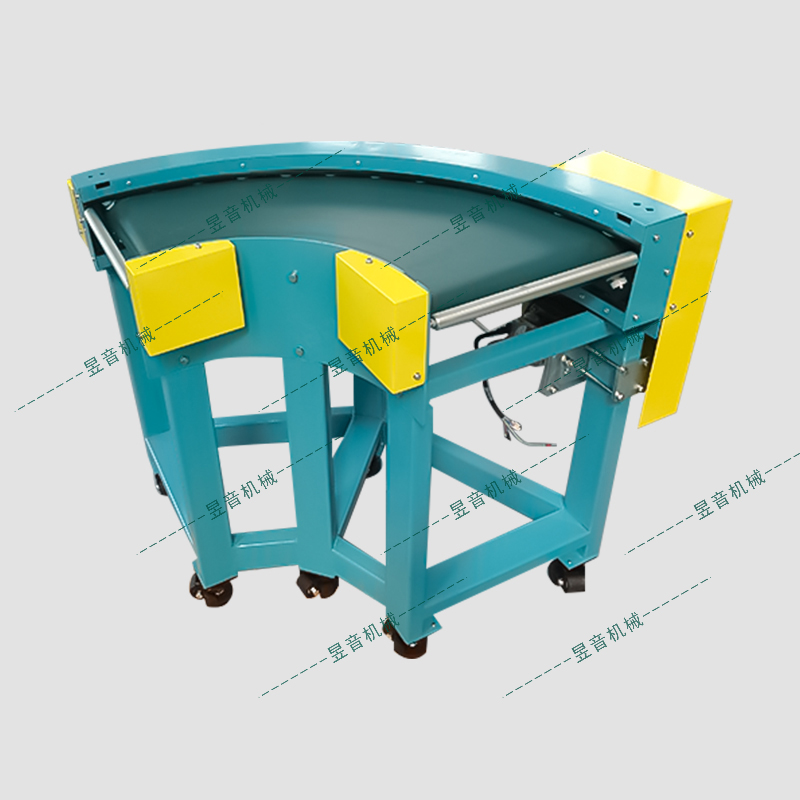
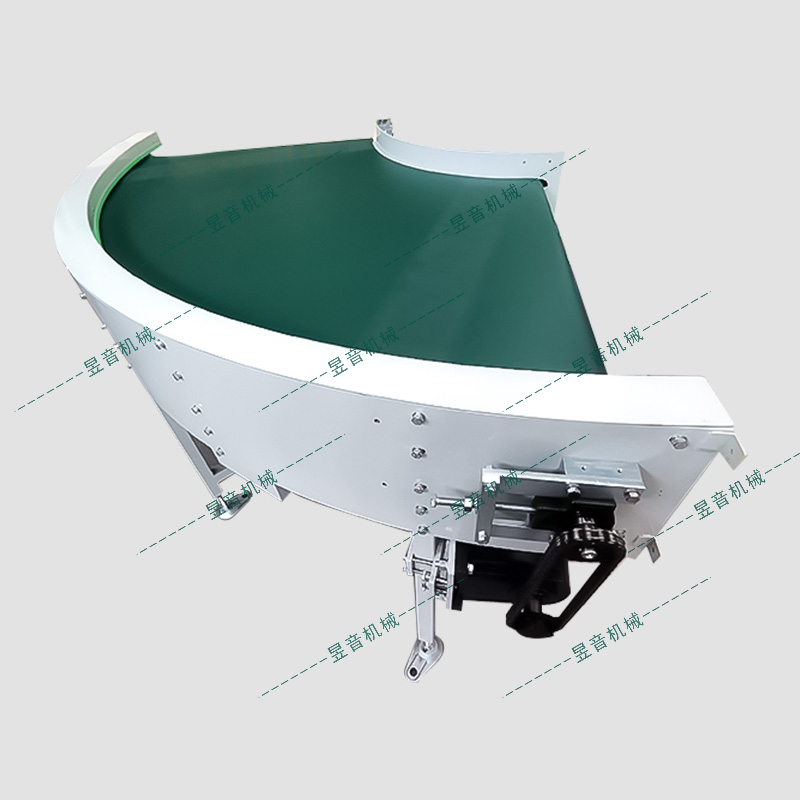
皮帶輸送機非常廣泛應用于家電、電器、煙草、注塑、印刷以及食品等各行各業,隨著各個物件的組裝、檢測、調試、包裝運輸等。輸送機可以根據不同的工藝要求進行選用普通連續運行、節拍運行及變速運行等多種控制方式。皮帶輸送機主要是由輸送帶、托輥、滾筒及驅動、制動、張緊、改向、裝載、卸載及清掃等置進行組合成。皮帶輸送機是一種摩擦驅以連續方式輸送物料的輸送設備,在進行輸送物料時,由最初的供料點到最終的卸料點間形成一種物料的輸送流程,它既可以進行碎散物料的輸送,也可以進行成件物品輸送。
皮帶輸送機的下鏈動力學分析模型包含著940個鏈節、82根擺桿、1條鏈條導軌樣條曲線、1條擺桿返回導軌樣條曲線。采用循環語句控制的Adams腳本語言自動建模方法,具體流程為:

1. 皮帶輸送機導入鏈條導軌的曲線關健點和擺桿返回導軌的曲線關健點;
2. 在輸送設備在進行創建鏈條導軌樣條曲線和擺桿返回導軌的樣條曲線;
3. 導入鏈節和擺桿等三維CAD模型,設定各自質量等;
4.創建鏈節之間、鏈節與擺桿之間鉸接約束;
5.創建鏈節與鏈條導軌樣條曲線間的點線約束以及擺桿與擺桿返回導軌樣條曲線間的點線約束;
6. 在鏈節上施加與鏈條導軌間的摩擦阻力,在擺桿上施加與擺桿返回導軌間的摩擦阻力;
7. 在鏈條尾端施加重錘張緊力,在鏈條前端施加速度驅動,設定分析條件求解計算。
施加鏈節與鏈條導軌間的摩擦阻力以及擺桿與擺桿返回導軌間的摩擦阻力時采用庫倫摩擦力模型。對于動摩擦,摩擦力與支持力大小、摩擦因數和運動方向等有關,根據分析得到x方向摩擦力分量和y方向摩擦力分量的計算公式。
鏈傳動系統共20個單元,而上鏈和下鏈都有九個單元,機頭鏈輪有一個單元,機尾鏈輪也有一個單元,該單元的主動力主要由鏈輪驅動轉矩來輸入。建立基于Matlad軟件包皮帶輸送機的鏈傳動系統仿真模型,把恒定的驅動轉矩輸入到機頭和機尾兩處的鏈輪中,而其輸出則是系統里每個單元的位移、速度與加速度以及鏈條的動張力。
皮帶輸送機應該對實際運行中的阻力進行克服。而運行阻力即為其中產生的摩擦力和拉力之和、皮帶輸送機傾斜角度、傾斜系數之間的乘積,將他們分別設為F、θ和a,則運行阻力FZ=F×θ×a。而F包括帶回的煤與中部槽下表面之間的摩擦力、運載煤為克服溜槽側幫而產生的摩擦力以及拉動刮板與鏈條所需拉力。
根據參數與相關計算公式,可以得到允許阻力的范圍在720KN至780KN,在本文取其值為760KN。鏈輪半徑為0.25米,在滿載工況穩定運行的前提下,輸入機頭與機尾鏈輪處的轉矩應該是運行阻力與半徑乘積的一半,即為95KN/m。在滿載啟動工況下,應該將上面計算得到的恒定轉矩同時輸入機頭和機尾鏈輪處。其中,仿真時間達到20秒。在自由停機工況下,當滿載啟動十秒之后,應該使得機頭與機尾的鏈輪輸入轉矩為0,再進行仿真試驗。在受異常荷載卡鏈工況下,當滿載啟動第十秒時,通過對單元6進行20秒的值為1MN異常巨大荷載的卡鏈工況仿真,載荷持續時間為1秒。 http://www.xmgou.cn/皮帶輸送機技術整理發布。